НАСА просит добровольцев пометить фотографии марсианской поверхности, чтобы помочь марсоходу Curiosity(Любопытство) избегать препятствий, таких как рыхлый песок.
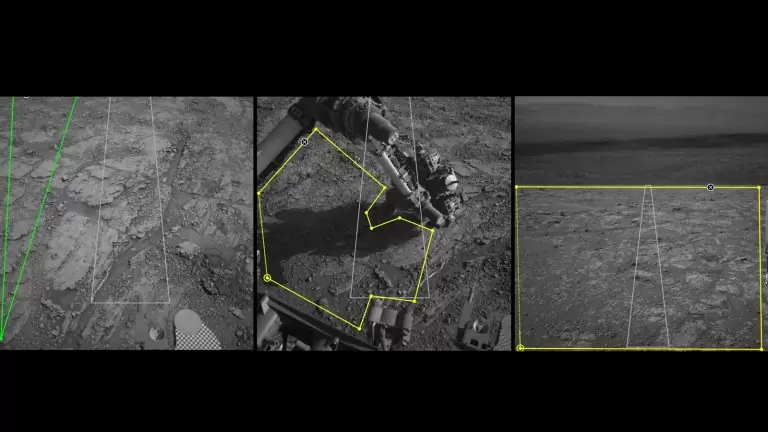
Вы можете помочь марсоходу Curiosity перемещаться по Марсу, просматривая фотографии скалистого пейзажа красной планеты и помечая то, что вы видите. НАСА просит добровольцев помочь d маркировке тысяч фотографий, сделанных ровером. Это нужно для проекта машинного обучения, который поможет планировщикам пути ровера выбирать плавные маршруты, после того как годы резкого рельефа повредили протекторы ровера.
По состоянию на четверг(25 июня) добровольцы выполнили около 71 процента работы. Программа аналогична искусственному интеллекту, стоящему за автономными машинами на Земле, которые обучены распознавать окружающую обстановку на основе фотографий. Но на Марсе нет дорог, уличных знаков или светофоров, которые могли бы направлять путь ровера. У Curiosity просто есть свое программное обеспечение, ученые и инженеры в НАСА и шесть собственных колес для движения по поверхности Марса.
Марс — опасное место для робота размером с машину. Spirit, марсоход, который приземлился на Марсе в начале 2004 года, застрял в мягкой почве в мае 2009 года. Двойной вездеход Opportunity также приземлился в 2004 году и оставался в живых до 2018 года, пока шторм пыли не скрыл его местоположение.
Любопытство высадился на красной планете в 2012 году. Теоретически, выбор четких, гладких путей может помочь продлить полезное время пребывания Любопытства на Марсе. К 2017 году зигзагообразные ступени марсохода получили повреждения, угрожающие их способности нести его четырехтонную массу. Это случилось после того, как марсоход проехал всего около 22 км. Согласно заявлению НАСА, команде планировщиков может потребоваться от четырех до пяти часов, чтобы понять, куда Curiosity следует направиться и как туда добраться.
Обычно для обучения такого рода алгоритма машинного обучения требуются сотни тысяч изображений. Но пока существует не так много фотографий марсианской местности. Группа планирования роверов использует программу под названием «Свойство почвы и классификация объектов», или SPOC, но они надеются, что, работая с волонтерами, чтобы обучить его большему количеству своих фотографий Марса, он будет работать лучше и быстрее, чем сейчас. Улучшения SPOC также могут помочь следующему марсоходу, Perseverance, когда он прибудет на поверхность планеты.
«В будущем мы надеемся, что этот алгоритм станет достаточно точным для выполнения других полезных задач, таких как прогнозирование вероятности скольжения колес ровера на разных поверхностях», — говорит Хиро Оно, эксперт по искусственному интеллекту Лаборатории реактивного движения.
Когда Curiosity достиг вершины холма в марте (и сделал селфи), ему пришлось подняться по 30-градусному уклону, что иногда приводило к тому, что его колеса вращались на месте.
Если SPOC сможет лучше идентифицировать безопасную местность, по которой могут перемещаться его колеса, это поможет исследователям провести дополнительные исследования основной задачи Curiosity: найти признаки того, что Марс когда-то мог быть обитаемым.
Помочь марсоходу вы можете по этой ссылке: www.zooniverse.org/projects/hiro-ono/ai4mars
Вас также может заинтересовать:
48 человек, регулярно курящих каннабис, участвовали в двойном слепом плацебо-контролируемом эксперименте с четырьмя разными дозами,… Читать далее
Женщины во время ходьбы в темноте активнее сканируют обстановку вокруг. По мнению исследователей, такое внимание… Читать далее
Это случай из клинической практики про эффект ноцебо. 26-летний мужчина обратился в регистратуру отделения неотложной… Читать далее
Исследователи могут вызвать конкретный тип смеха точечным разрядом тока. Когда мы искренне хохочем над отличной… Читать далее
Артроскопия коленного сустава при дегенеративных заболеваниях коленного сустава считается одной из самых распространённых ортопедических операций.… Читать далее
Популярная идея о том, что микротравмы ответственны за рост мышц, появилась не на пустом месте.… Читать далее
